What exists
A from-scratch, state-of-the-art 3D Gaussian Splatting1 trainer, extensible for agricultural capture.
A measurement layer for agriculture
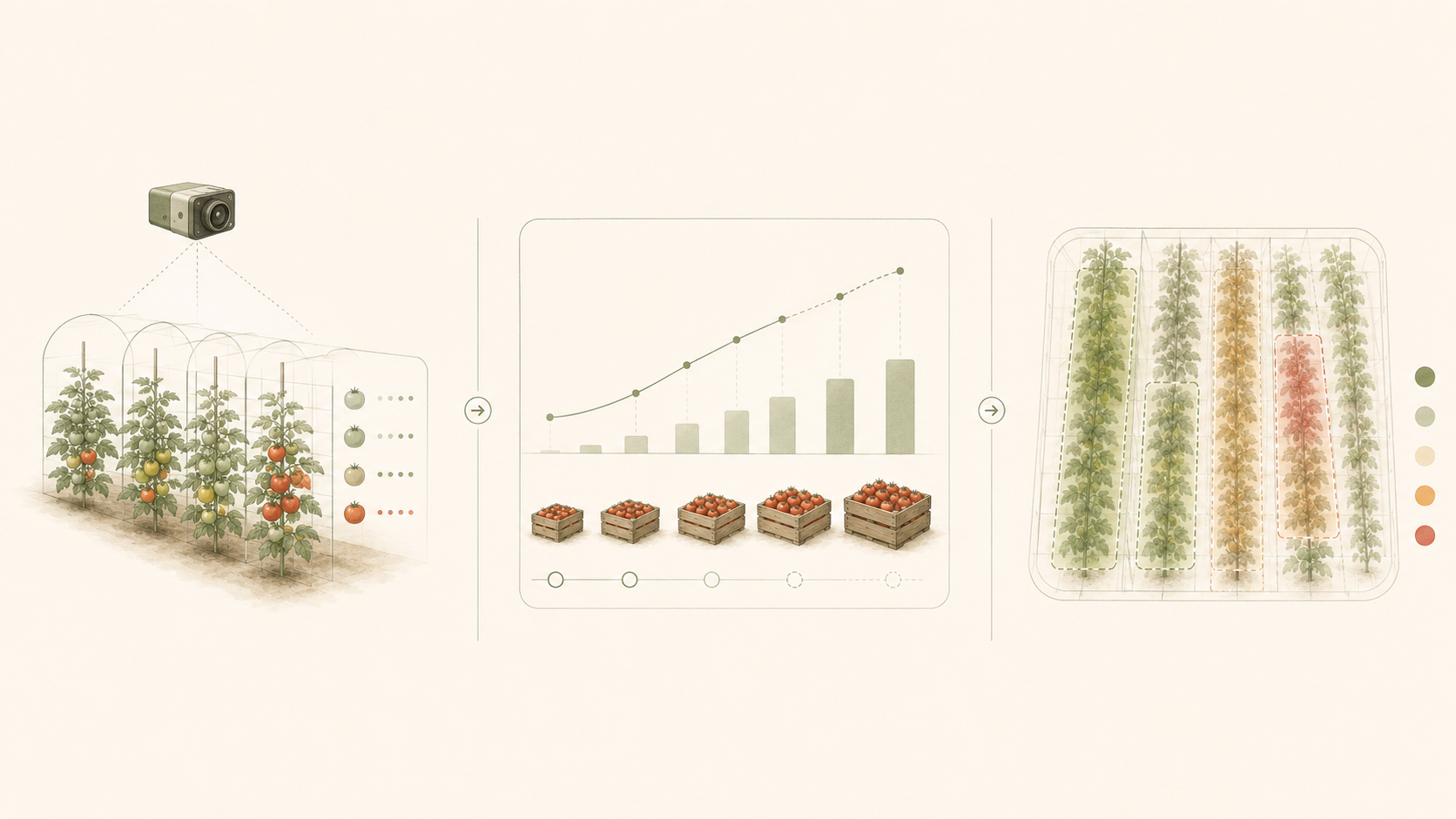
Growers make decisions from sparse samples of a crop that changes every day. I want to turn a simple camera pass into a measurable record of what is growing, how it changes, and what is ultimately harvested.
The first test is whether repeated 3D capture, combined with greenhouse data, can improve crop registration and short-horizon harvest forecasts.
The reconstruction capability exists. The agricultural system is the experiment.
Ordinary photos become an interactable 3D reconstruction you can inspect. This is the measurement tech, not the agricultural product.
Agriculture already has images, climate and harvested totals (kgs). What is missing is the link between them, and it barely exists in public data.

First proposed product
The first customer does not buy a "world model". They buy a better answer to three questions: what is on the crop now, what will be harvestable next, and where/how/why is the forecast changing.
The goal: a forecast reliable enough to plan with: sales planning, labour, packing and logistics, while reducing manual crop registration.
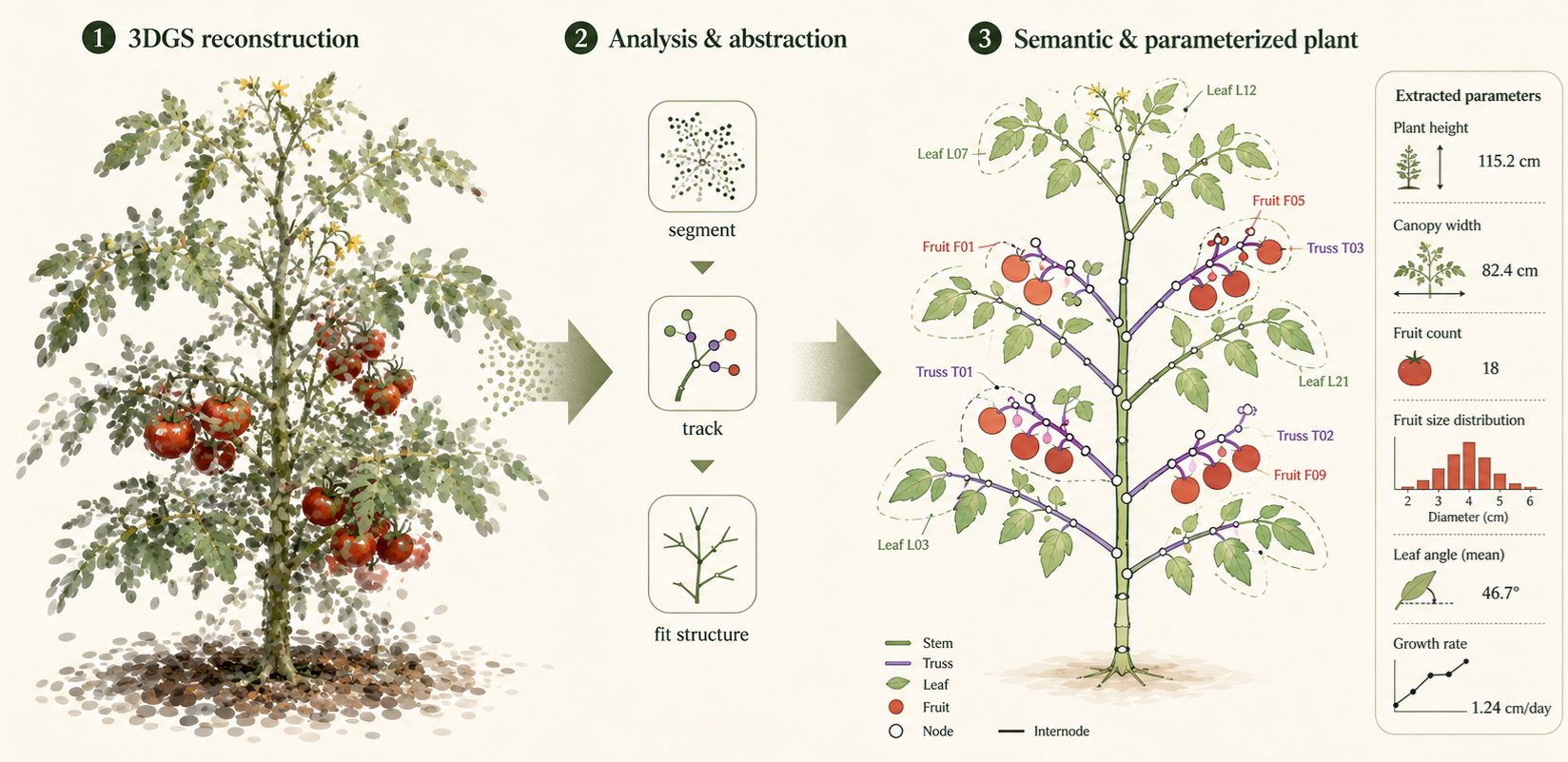
A from-scratch, state-of-the-art 3D Gaussian Splatting1 trainer, extensible for agricultural capture.
Repeated capture, fruit segmentation, spatial registration, size and maturity, and climate and harvest alignment.4
Whether the 3D/4D crop state beats cheaper 2D and climate-only baselines.8
A single, falsifiable experiment designed to show exactly where longitudinal 3D helps, and where it does not.
Indeterminate greenhouse tomato
A commercial greenhouse or research facility
Repeated capture and weekly harvest outcomes
Images, climate, irrigation and management logs
Harvested weight and grade, by row or zone
History + greenhouse climate
Climate + ordinary 2D imagery
Climate + longitudinal 3D/4D crop state
Success is a measurable advantage from 3D on at least one axis: lower forecast error, more reliable counting under occlusion, or less manual registration.
The pilot answers one question: what exactly will the first cheque let us discover?
The moat is not raw imagery. It is longitudinal crop data aligned with environment, interventions and real outcomes: the distribution a generalizable crop model has to learn from.

This distribution is not public. Off-the-shelf models never learned it, and images alone do not contain it. Acquiring this out-of-distribution data is the means to Earth Models, and the way to own what the model will need.
a model expressive enough to represent the function.
training that actually finds those parameters.
the de facto lever is data. That is what every deployment compounds.
Harvested repeatedly over a long cycle, producing many prediction-versus-actual events from a single crop.
Grown with existing climate data, so the environmental track the forecast needs is already being logged.
Fruit is partially occluded by canopy, exactly the structural problem where 3D might earn its cost.
Strawberry remains a possible lower-occlusion validator, but tomato is the starting point.

Each rung compounds proprietary data no public model has seen.
What is present now?
What will be ready, and when?
How is growth changing?
How does it respond to climate and management?
What representations transfer across cultivars, sites and crops?
Learned models of biological systems interacting with their environment.
Earth Models is the north star, not the first product. World models, for the living world.
I work on differentiable rendering, world modeling, gpu programming and machine learning systems at Electronic Arts' research Lab (SEED). I am one of few to have written a complete, state-of-the-art 3D Gaussian Splatting trainer from scratch. It is mine and soon Open Source, to extend for agricultural capture, and I own the full path from cameras and geometry to GPU deployment.
I love 3DGS, but I am attached to the crop-state problem, not to one representation. If calibrated 2D wins, the company should use it ( although I'm 99% sure that 3D will deliver stronger priors to get valuable data from :D ).
The missing complement is deep agronomy and commercial greenhouse access: the team I need to build around the technology.
Seeking one greenhouse partner and one crop-domain collaborator for an 8-12 week tomato pilot: repeated row access, climate logs and harvested weight by zone. We report transparently where 3D helps, and where it does not.
contact@earthmodels.ag